[이데일리 신하영 기자] 아주대 연구진이 복잡한 표면을 정확하게 측정해 낼 수 있는 로봇 기술을 개발했다. 향후 휴머노이드 로봇이나 산업용 로봇 기술에서 활용이 가능할 것으로 기대된다.
 | | 사진=아주대 제공 |
|
아주대는 김의겸
(사진) 기계공학과 교수팀이 이러한 연구성과를 거뒀다고 1일 밝혔다. 이번 연구에는 아주대 기계공학과의 정다운 연구교수와 부성운 학생(석사과정)이 공동 제1저자로 참여했으며 김의겸 교수는 교신저자를 맡았다.
로봇 분야에서 ‘접촉 정보’는 조작, 인지, 상호작용 등 다양한 측면에서 중요하게 활용된다. 접촉 정보란 △외부 물체와 접촉된 위치와 방향 △작용하는 힘의 강도를 모두 포함한다. 그동안 접촉 정보를 정확하게 측정하기 위해 많은 장치·방법이 연구됐지만 기술적 한계로 완전한 정밀 측정은 이뤄지지 못했다.
아주대 연구팀은 주로 컴퓨터 그래픽에서 물체의 형상을 표현할 때 사용돼 온 삼각메쉬구조(Triangle mesh structure)를 표면 기하학적 정보를 알아내기 위해 활용했다. 이를 통해 수많은 삼각형으로 이뤄진 메쉬구조에서 정확한 접촉 정보를 알아내는 알고리즘을 개발해낸 것이다.
아주대는 “접촉력의 크기뿐 아니라 3차원 방향과 3차원 위치를 모두 정밀하게 측정하는 데 성공했다”며 “연구팀은 0.4ms의 빠른 연산 속도로, 0.134mm 이내의 정밀한 접촉 위치 정보를 확인했다”고 설명했다.
이번 연구는 산업통상자원부의 로봇산업핵심기술개발사업 지원을 받아 수행했으며 연구 결과는 저명 국제 학술지(IEEE Transactions on Industrial Informatics) 3월호에 게재됐다.
김의겸 교수는 “이번 연구는 다양한 형상 표면에 대해 실시간으로 정밀하게 접촉을 감지할 수 있음을 보여주는 성과”라며 “정교한 힘 제어가 필요한 휴머노이드 로봇이나 산업용 협동 로봇 등에 활용될 수 있을 것”이라고 했다.







![[포토]박지영,핀을 향하여](https://spnimage.edaily.co.kr/images/Photo/files/NP/S/2024/11/PS24110100110t.jpg)
![[포토] '트릭 오어 트릿' 진행하는 바이든 대통령 부부](https://image.edaily.co.kr/images/Photo/files/NP/S/2024/10/PS24103102211t.jpg)
![[포토] 송민혁 '이글 2개, 버디7개 잡은 날'](https://spnimage.edaily.co.kr/images/Photo/files/NP/S/2024/10/PS24103100152t.jpg)
![[포토]치솟던 배춧값 대폭 하락…"물량 충분해"](https://image.edaily.co.kr/images/Photo/files/NP/S/2024/10/PS24103101370t.jpg)
![[포토]삼성전자 반도체 영업익 4조](https://image.edaily.co.kr/images/Photo/files/NP/S/2024/10/PS24103101369t.jpg)
![[포토]하모니카 연주가 이윤석의 연주](https://image.edaily.co.kr/images/Photo/files/NP/S/2024/10/PS24103101230t.jpg)
![[포토]민통선 주민들 트랙터 시위](https://image.edaily.co.kr/images/Photo/files/NP/S/2024/10/PS24103101122t.jpg)
![[포토] 서울시예산안 설명하는 오세훈 시장](https://image.edaily.co.kr/images/Photo/files/NP/S/2024/10/PS24103100890t.jpg)
![[포토] 벤틀리모터스코리아, '더 뉴 컨티넨탈 GT 스피드' 공개](https://image.edaily.co.kr/images/Photo/files/NP/S/2024/10/PS24103100418t.jpg)
![[포토] 2024 서울 문화원 엑스포](https://image.edaily.co.kr/images/Photo/files/NP/S/2024/10/PS24103001770t.jpg)

![[포토]이선영,귀여운 브이](https://spnimage.edaily.co.kr/images/Photo/files/NP/S/2024/11/PS24110100175t.jpg)
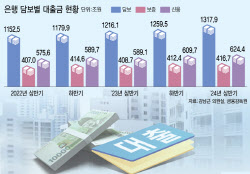
![[단독]대출 74%가 담보·보증대출…위험 피하는 은행](https://image.edaily.co.kr/images/Photo/files/NP/S/2024/11/PS24110100154b.jpg)
![퍼렇게 질린 뉴욕증시, 나스닥 2.8%↓…‘MS·메타 과도한 AI투자?[월스트리트in]](https://image.edaily.co.kr/images/Photo/files/NP/S/2024/11/PS24110100322b.jpg)
